

關(guān)于夜間拍照,相信你們都會遇到光線不足,易產(chǎn)生噪點這些問題。然而同樣的無人機,為什么別人卻拍出清晰通透,噪點少,高畫質(zhì)的照片呢?
其實并不是運用什么高超的拍攝技巧,而是用堆棧。不借助任何濾鏡,只有裸機裸鏡,讓夜景的噪點徹底消失,在強光下玩超長慢門效果。
一、基本概念
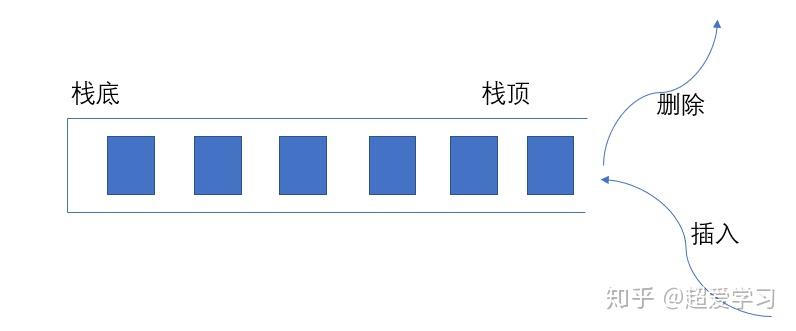
堆棧這一大神器,知道和運用的人不多。通常也叫裸拍法。意思是通過前期同角度連拍多張圖片,然后后期導入軟件,用堆棧,將一組參考幀相似、但品質(zhì)或內(nèi)容不同的圖像組合在一起,合成一張圖片。
知道了堆棧的工作方式了,來看看堆棧有那些強大的作用,模擬慢門、無損降噪、疊加軌跡等都是我們常用的技巧。
二、拍攝
要點一:懸停拍攝
堆棧需要多張相同的照片,所以這就要求無人機懸停拍攝,最好是無風的環(huán)境,微風下畫面稍有出入也沒關(guān)系,后期可以對齊裁切處理。
要點二:定時拍攝(連拍)
在無人機相機設(shè)置中,首選選擇M檔,選擇定時拍攝或者連拍,或者手動用遙控器控制拍攝,總之要拍攝多張照片沒有載入堆棧功能,以供后期處理。
三、后期
實現(xiàn)堆棧的合成有很多途徑,是的擴展工具,優(yōu)點是支持,速度快。還有如、、等軟件,也可以實現(xiàn),這里機長用最方便的自帶堆棧功能。
1、倒入到ps軟件
打開,選擇文件—>腳本—>將文件載入堆棧。瀏覽找到文件夾,全選需要堆棧的圖片,然后打開。

2、載入圖層
最下面嘗試自動對齊和載入圖層后創(chuàng)建智能對象都要勾選。無人機鏡頭通常會稍微有點抖動,拍攝畫面有點出入,需要自動對齊。并創(chuàng)建智能對象,以方便后期運用堆棧功能。
3、堆棧模式
倒入圖存后,自動對齊,畫面邊角會稍微有點出入,可以修復,也可以暴力裁切掉。
然后運用圖層—>智能對象—>堆棧模式—>最大值。
選擇最大值后,保存的是高光的地方,所以路上行車的軌跡也都保留下來了,同時也降噪,堆棧處理到這里,流程已經(jīng)完了。至于調(diào)色就根據(jù)個人喜好了。
四、堆棧的更多運用
上面提到,堆棧主要用于模擬慢門、無損降噪、疊加軌跡等,實際上上面的圖已經(jīng)展示過,這里再詳細講解下。
1、模擬慢門
這個是機長華強北拍攝的落日圖組。
間隔5秒延時拍攝,通過堆棧處理后,得到下圖。
可以看到天空的云彩,通過堆棧得到慢快門的效果,云層有流動感。正常情況下,如果要得到這樣的照片,必須使用ND濾鏡。相對來說,堆棧更省錢省時間。
2、無損降噪
下圖為堆棧處理前后的局部對比圖,可以明顯看到,兩者的差別。堆棧處理后,噪點很有效的消除了。

這里值得一提的是,機長在對這張圖片進行堆棧模式時,選擇的是平均值。堆棧模式中,平均值和最大值都能有效降噪。而"最大值"是常常是星軌疊加時選用的參數(shù),保留的的是高光部分。這個算法將堆棧中各圖層中最亮的部分顯示到最終合成的照片上。
假設(shè)有5張照片,對于每張同一位置的某個點,這點的亮度是:Max(0、5、10、15、20)=20,取"最大值",合成到圖片中。
那么平均值呢,還是假設(shè)有5張照片沒有載入堆棧功能,對于每張同一位置的某個點,這點的亮度是:(0+5+10+15+20)/5=10,取這個"平均值",合成到的照片中。最大值和平均值,都有降噪效果,但是取平均值降噪要優(yōu)于最大值。所以機長這里選用平均值。
4、軌跡疊加
在處理移動的物體,堆棧模式取最大值時,可以看到車輛移動的軌跡都有所保留。
最多的應(yīng)用就是拍攝星軌,可以得到如梵高《星夜》那樣美麗的星辰軌跡圖。