

1、庫卡機器人零點標定使用的工具通常有兩種:1)千分表,標定精度偏低。2)EMD電子裝置,標定精度較高。
2、庫卡機器人停機模式有三種。分別是:STOP0,STOP1,STOP2這三種模式,停止的過程也不同。
3、庫卡機器人控制柜有基本的有5種型號。分別是:緊湊型( )、小型( -2 )、標準型( )、中型( )以及加高型( )
4、KUKA機器人可以在示教器中設置每個軸的限位值,防止碰撞。
5、庫卡機械臂本體的組成:1)底座 2)轉盤 3)平衡缸 4)大臂 5)小臂 6)中心軸。其中平衡缸不是每臺機器人都有的,負載較大的機器人則會配備平衡缸。
6、工業(yè)機器人一般由機械手、機器人控制系統(tǒng)、手持編程器組成庫卡機器人基礎知識,機器人與控制柜之間的連接電纜以及控制系統(tǒng)也同樣屬于機器人系統(tǒng)范疇。所有不包括在工業(yè)機器人系統(tǒng)內(nèi)的設備被稱為外圍設備工具、外部PLC、傳輸帶、傳感器、防護圍欄或其他保護裝置等。
7、使用增量模式可以移動庫卡機器人的某個軸固定的值,比如移動一軸10°。
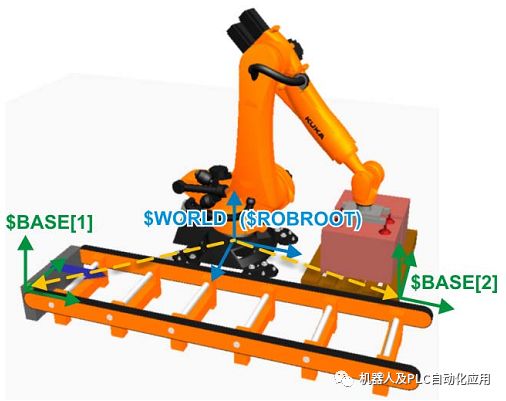
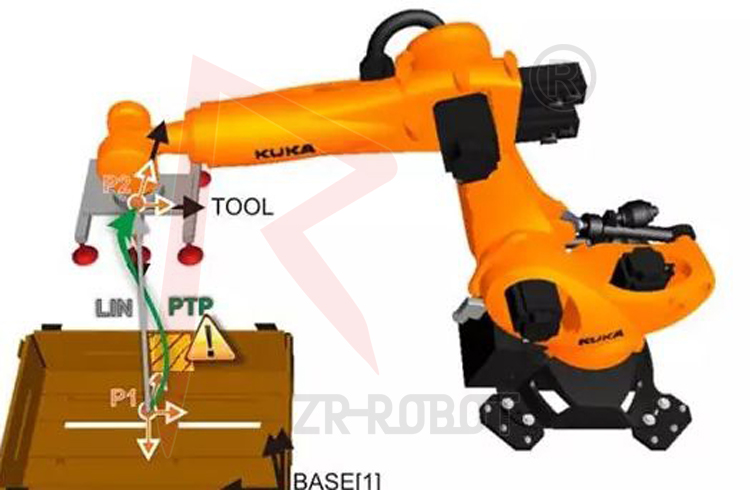
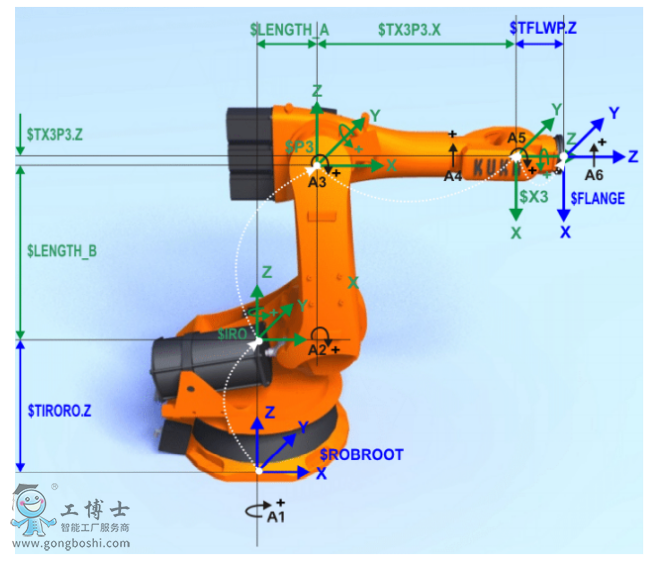
8、庫卡機器人的坐標系有1)機器人足部坐標系2)WORLD世界坐標系3)BASE基坐標系4)法蘭坐標系5)TOOL工具坐標系
9、庫卡機器人負載數(shù)據(jù)標定不準確的話會造成1)異響 ,2)振動 ,3)節(jié)拍下降 ,4)機器人使用壽命
10、機器人的工具負載是指所有裝在機器人法蘭上的負載。
11、機器人上的附加負載的差異會對機器人有以下幾項影響:1)軌跡規(guī)劃,2)加速度,3)節(jié)拍時間
12、庫卡機器人的編程方式有使用示教器在線編程以及、、 Edit等軟件
13、庫卡機器人的仿真是通過和兩個軟件配合實現(xiàn)的。
14、庫卡機器人可以保存16個工具坐標系。
15、庫卡機器人標定工具坐標系有1)確定工具坐標系原點庫卡機器人基礎知識,2)確定工具坐標系姿態(tài)兩大步驟
16、庫卡機器人確定工具坐標系原點有XYZ四點法和XYZ參照法兩種方法
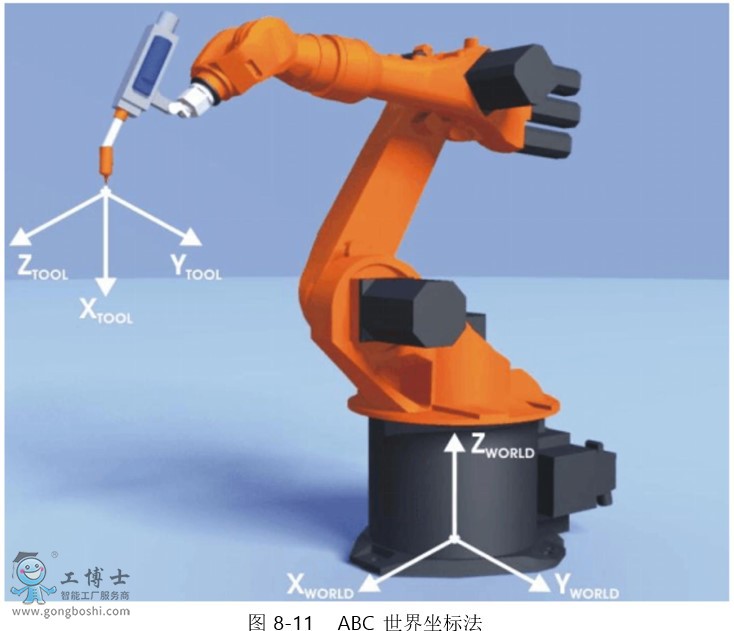
17、庫卡機器人確定工具坐標系姿態(tài)有ABC世界坐標法和ABC 2點法兩種方法
18、庫卡機器人控制系統(tǒng)是KSS系統(tǒng)。是 的縮寫。
19、創(chuàng)建庫卡機器人的基坐標系有3點法 、間接法和數(shù)字輸入法三種方法
20、庫卡機器人最多可以建立32個基坐標系
21、庫卡機器人示教器上有很多選項是灰色是點擊不進去,有可能是用戶沒有切換。可以切換為專家用戶
22、庫卡機器人查看當前坐標值:菜單路徑:機器人按鍵>顯示>實際位置。
23、庫卡機器人中CCU是 Unit(控制柜)的簡寫。是機器人控制系 統(tǒng)所有部件的配電裝置和通訊接口
24、庫卡機器人中 Power Pack (庫卡配電箱)
25、庫卡機器人中KSP是KUKA Servo Pack (庫卡伺服包)
26、庫卡機器人中RDC是 (分解器數(shù)字轉換器),RDC是一種可將分解器模擬數(shù)值轉換成數(shù)碼數(shù)值的電路板。
27、庫卡機器人中SIB是 Board (安全接口板)。機器人的安全接口板(SIB)根據(jù)實際需求而定,在機器人控制系統(tǒng)里可采用兩種不同的SIB
28、庫卡機器人標準型控制要接急停和安全門信號可以接在X11端子排上。
29、庫卡機器人中的項目下載和上傳通過軟件上傳下載項目
30、庫卡機器人應用軟件 KUKA. 系列產(chǎn)品可快速地將氣體保護焊投入運行和編制焊接程序