

由于人工智能自上而下法的局限,在這一領(lǐng)域的嘗試已經(jīng)轉(zhuǎn)而采用一種自下而上的方式,即模仿進(jìn)化過程和嬰兒學(xué)習(xí)的方式。例如,與超級計算機(jī)的處理方式不同,昆蟲并不是通過掃描周圍環(huán)境再將其壓縮成數(shù)萬億個像素來進(jìn)行導(dǎo)航的。取而代之的是,昆蟲的大腦是由“神經(jīng)元網(wǎng)絡(luò)”組成的用神經(jīng)網(wǎng)絡(luò)設(shè)計自動跳舞機(jī)器人控制系通過,通過投入充滿敵意的世界來慢慢學(xué)會在如何在其中行走。
在麻省理工學(xué)院,能行走的機(jī)器人聲名狼藉,難以通過自上而下的方式制造出來。但是,投入周圍環(huán)境、從零開始學(xué)習(xí)的簡單的昆蟲形態(tài)的機(jī)械生物,已經(jīng)能成功地在幾分鐘內(nèi)繞著麻省理工學(xué)院的樓梯小步疾跑了。麻省理工學(xué)院著名的人工智能實(shí)驗(yàn)室由于其巨大、笨拙的“自上而下”的行走機(jī)器人而聞名,其負(fù)責(zé)人羅德尼·布魯克斯在探索微型“昆蟲”機(jī)器人這一概念的時候變成了“異端者”。這些“昆蟲”機(jī)器人在磕磕絆絆中學(xué)習(xí)老式行走方式。他沒有使用復(fù)雜的計算機(jī)程序來精確計算它們行走的時候腳的精確位置,而是以很少的計算機(jī)能力,通過測試與錯誤來協(xié)調(diào)它們的腿部動作。
今天,許多布魯克斯發(fā)明的昆蟲機(jī)器人的后代正在火星上為NASA(美國國家航空航天局)收集數(shù)據(jù),依靠自己的思想小步疾跑,穿過荒涼的火星表面。布魯克斯相信他的昆蟲適合對太陽系的探索,非常理想。

布魯克斯的項(xiàng)目之一是COG,目的是制造一臺具有6個月大嬰兒的智力的機(jī)器人。COG的外表像是一團(tuán)亂糟糟的電線、電路和齒輪,只不過它有頭、雙眼和手臂。它沒有被寫入任何智能法則。取而代之的是,它的雙眼注視著一位人類訓(xùn)練師,他試著教會它簡單的技能。

雖然有模仿昆蟲行為的成功案例,但當(dāng)編程人員試圖在機(jī)器人身上復(fù)制哺乳動物等高等動物的行為時,使用神經(jīng)網(wǎng)絡(luò)系統(tǒng)的機(jī)器人都表現(xiàn)得極差。
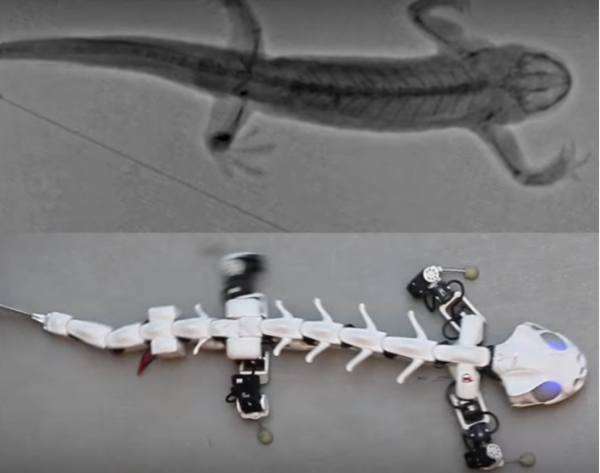
最先進(jìn)的使用神經(jīng)網(wǎng)絡(luò)系統(tǒng)的機(jī)器人可以在房間里走動或者在水中游泳,但它無法像狗一樣在森林里跳躍和狩獵,或者像老鼠一樣在房間里四處快跑。許多大型神經(jīng)網(wǎng)絡(luò)系統(tǒng)機(jī)器人可能會由數(shù)十個到數(shù)百個神經(jīng)元構(gòu)成,然而,人類大腦擁有超過1000 萬個神經(jīng)元。線蟲是一種簡單的蠕蟲,其神經(jīng)系統(tǒng)已經(jīng)被生物學(xué)家完全繪制出來。它的神經(jīng)系統(tǒng)僅有300多個神經(jīng)元,這使得它的神經(jīng)系統(tǒng)成為自然界中發(fā)現(xiàn)的、或許是最為簡單的神經(jīng)系統(tǒng)之一。這些神經(jīng)元之間有7000多個突觸。即使像秀麗隱桿線蟲這樣簡單的生物用神經(jīng)網(wǎng)絡(luò)設(shè)計自動跳舞機(jī)器人控制系通過,其神經(jīng)系統(tǒng)也極為復(fù)雜,以至沒有人能夠建立其大腦的計算機(jī)模型。(1988年,一位計算機(jī)專家預(yù)測,到目前為止,我們應(yīng)該擁有具備超過1 億個人造神經(jīng)元的機(jī)器人。事實(shí)上,具備超過100個神經(jīng)元的神經(jīng)系統(tǒng)就被認(rèn)為很杰出了。)

最為諷刺的是,機(jī)器能夠毫不費(fèi)力地完成人類認(rèn)為“困難”的工作,比如將很大數(shù)字相乘或者下棋;但是機(jī)器在被要求完成對于人類而言極簡單的工作時(比如走過一間房間、辨認(rèn)面孔或者與朋友說長道短)卻會嚴(yán)重出錯。原因是,我們最先進(jìn)的計算機(jī)在本質(zhì)上僅僅是做加法的機(jī)器。可是,我們的大腦是經(jīng)過進(jìn)化的精心設(shè)計,以解決世俗的生存問題的,這需要一整套復(fù)雜的思維結(jié)構(gòu),如常識和模式識別。在森林中生存并不依賴于微積分或國際象棋,而是依靠躲避天敵、尋找配偶,適應(yīng)不斷變化的環(huán)境。
麻省理工學(xué)院的馬文·明斯基,人工智能最初的奠基人之一,這樣總結(jié)人工智能所存在的問題:“人工智能的歷史有點(diǎn)兒可笑,因?yàn)樽畛醯膶?shí)際功績都是美麗的事物,比如能夠做出邏輯論證或者在微積分課題中取得好成績的機(jī)器。但隨后我們開始試圖制造能夠回答關(guān)于初級閱讀材料中簡單故事的問題的機(jī)器。目前沒有機(jī)器可以做到這一點(diǎn)。”
綜上所述,隨著科技的發(fā)展,最終將會出現(xiàn)介于自上而下和自下而上兩種途徑之間的絕妙綜合體,它或許將提供通向人工智能和類人機(jī)器人的道路的關(guān)鍵。歸根結(jié)底,當(dāng)一個孩子學(xué)習(xí)的時候,雖然他最初主要依賴自下而上法,投入他周圍的環(huán)境,但最終他會獲得來自父母、書本和學(xué)校教師的指點(diǎn),用自上而下法學(xué)習(xí)。作為成年人,我們不斷將這兩種方式混合使用。