

其實無論哪個品牌的機器人,都有工具/工件坐標系的創建需求,并且作用也基本一致。下面給大家講解一下工具坐標系:
工具坐標系是一種用于描述工具有效作業點和有效作業方向的直角坐標系。帶來的好處有:
(1)便于手動JOG操縱
(2)滿足修改、重定義工具坐標系的需求
(3)方便編程工具的切換
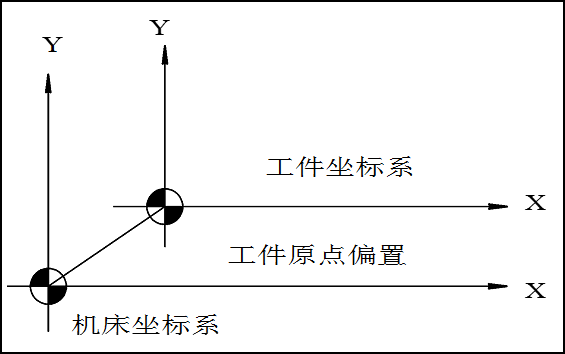
工件坐標系是一種由編程用戶自定義的直角坐標系abb機器人校tcp點方法,有時也被稱作編程坐標系或者用戶坐標系。能夠起到方便機器人手動操縱和方便編程的作用。帶來的好處有:

(1)便于手動JOG操作
(2)便于運動軌跡遷移
(3)便于坐標系偏移補償
今天主要對創建過程中的要點進行說明,并且與ABB機器人工具/工件坐標創建進行比較。
FANUC工具坐標創建要點
FANUC工具坐標創建有如下圖所示方法:

常用的方法為:三點法、六點法和直接輸入法。
其中,三點法只定義工具TCP的位置(工具坐標系方向與機器人末端軸法蘭盤上的坐標系方向一致,也就是ABB的Tool0)。
六點法同時定義工具TCP和工具坐標系方向。由于工具坐標系和工件坐標系都屬于直角坐標系,遵循右手法則,所以六點法(XZ)、六點法(XY)都可以定義出完整的坐標系。
在這里需要強調的是:
1.三個接近點不能處于同一平面,并且相互之間大于90°為佳。

2.坐標原點可以與其中一個接近點一致,這樣可以方便定義。并且工具與校準針平面處于垂直狀態為佳。
3.定義坐標系X/Y或者X/Z方向時,先回到坐標原點,并且切換到世界坐標系abb機器人校tcp點方法,以同一個姿態進行坐標系方向的確定。
4.特別需要注意的是,FANUC機器人定義工具坐標系方向時,機器人移動的方向即為坐標系方向的正方向,此點與ABB機器人相反。
假設下面2圖都是定義X軸方向,則FANUC和ABB機器人X軸正方向是不同的。
FANUC機器人▲
ABB機器人▲
FANUC工件坐標創建要點

FANUC工件坐標創建有如下圖所示方法:
FANUC工件坐標遵循右手法則,三點法和直接輸入法與ABB一致。
重點說一下四點法,定義的四個點分別為:
通過X軸原點和X方向點,確定X軸的正方向。
通過在XY平面上,定義Y方向點,確定Y軸的正方向。
再定義坐標原點,來確定整個工件坐標系。